Rüzgar ölçümü, rüzgar enerji santrallerinin (RES) tasarımından, operasyon durumunu koruduğu ana kadar gerçekleştirilen bir işlem olarak nitelendirebilir. Kısaca, rüzgar enerjisi potansiyelini etkileyen tüm parametrelerin elde edilmesini amaçlamaktadır. Rüzgar yerküre üzerindeki ısı farklılıklarından oluşan basınç değişikliklerinin eşitlenme çabası sonucu açığa çıkan hava parsellerinin hareketidir. Bu hava parsellerinin sabit bir hızla hareket ettiği varsayıldığında, taşıdığı güç aşağıdaki denklem ile ifade edilebilir.

- Bir rüzgar ölçüm istasyonunda:
- 2.1 Rüzgâr Ölçüm İstasyonunda Bulunan Aletler
- 2.2.1 Rüzgâr Hız Sensörü (Anemometre)
- 2.1.1 Rüzgâr Yön Sensörü (Windvane)
- 2.1.2 Sıcaklık ve Nem Sensörü
- 2.1.3 Veri Toplayıcı (Data Logger)
- 2.1.4 Basınç Sensörü
- 2.1.6 İkaz Lambası
- 2.1.7 Paratoner
- 2.1.8 Güneş Paneli ve Şarj Cihazı
- 2.1.9 GSM Modem
- 2.2 Sensörlerin Kalibrasyonları
- 2.2.1 Anemometre Kalibrasyonu İçin Gerekli Şartlar
- 2.3 Rüzgâr Ölçüm İstasyonu Seçimi
- 2.3.1 Rüzgâr Ölçüm Sistemleri
- 2.3.1.1 Boru Tip Direkler
- 2.3.1.2 Kafes Tip Direkler
- 2.3.2 Rüzgâr Ölçüm Direği Kurulumunda Dikkat Edilmesi Gereken Hususlar
- 2.3.3 Rüzgâr Ölçüm Direği Kurulumunda Dikkat Edilmesi Gereken Hususlar (MGM Standartlarında)
- Rüzgâr Ölçüm Direği:

Ρ = Hava yoğunluğu (kg / m3)
r = Rotor Yarıçapı (m)
ν = Rüzgar Hızı (m / s)
Gü. denklemine bakıldığında da açıkça görüleceği üzere, rüzgar türbini rotor tarama alanından geçen hava parselinin rotorda bıraktığı gü. bu parselin hızı ile kübik orantılı olarak değişmektedir. Bu nedenle rüzgar enerjisinde rüzgar hızının doğru yöntemlerle tasvir edilmesi gerekmektedir. Rüzg.rın kaotik doğasının, birden çok parametreye bağlı olarak değişmesi göz önüne alındığında rüzg.rın istatiksel olarak tasvir edilmesinin ne kadar “gerekli” olduğu anlaşılabilecektir.
Her ne kadar denklemde açığa çıkan sonuca göre sadece rüzgar hızının ölçülmesi yeterli görünse de sağlıklı rüzgar istatistiklerinin oluşturulması ve hızın vektörel bir büyüklük olması nedeniyle yön bilgisine de ihtiyaç vardır. Bu anlamda rüzgar hızıyla birlikte rüzgar yönünün de ölçülmesi gerekmektedir. Hava yoğunluğu değerinin belirlenebilmesi için sıcaklık, basınç ve nem ölçümlerinin de yapılması gerekmektedir. Buna ek olarak, ideal ya da etkileşimli gaz denklemleri kullanılarak hava yoğunluğu tayini mümkün olmaktadır. Sıcaklık, nem ve basıncı içeren ölçümler çevresel ya da ikincil ölçümler olarak tanımlanabilir. ölçüm aletlerinin noktasal ölçüm almasından dolayı monte edileceği direğin bazı standartları sağlaması rüzgarın daha doğru tasvir edilmesini sağlayacaktır. Bu standartlar dünya genelinde kabul görmüş kurumlar tarafından yayınlanmakta olup, genel amacı rüzgarın daha düşük belirsizlikler yardımıyla tasvirini sağlamaya yöneliktir. Örnek olarak, direk üzerinde monte edilecek olan anemometreler direkten belli oranda uzakta, direk etkisini hissetmeyecek şekilde konumlandırılmalıdır. Bu nedenle rüzgar ölçüm direklerinde görece uzun yan kollar kullanılmaktadır. ölçüm istasyonunun planlanması sırasında hâkim rüzgar y.nünün değerlendirilerek sensör yerleşimlerinin buna göre gerçekleştirilmesi fayda sağlayacaktır. Bu sayede sensörlerin, daha az direğin, yıldırım koruma sisteminin ve diğer sensörlerin gölge etkisi altında kalması sağlanacaktır.
Bunun dışında kaydedilen verilerinde belli özelliklere haiz olması gerekecektir. Sadece rüzgar hızını belirlemenin yanında ölçüm aralığındaki en yüksek ve en düşük gözlemlerinden kaydedilmesi gerekecektir. Örnek olarak; 10 dakikalık ortalamaları sağlayan anemometre için veri kaydedici aynı zamanda bu 10 dakikalık zaman zarfı içerisinde kaydedilen en yüksek ve en düşük rüzgar hızını da kayıt altına alması gerekmektedir. Bu sayede rüzgarın türbülans olarak tabir edilen ve rüzgar türbinleri üzerine binen yükün hesaplanmasından birbirlerine olan kuyruk etkilerine kadar geniş çerçevedeki hesaplamalarda kullanılabilen türbülans parametresi elde edilmiş olur.
Bir rüzgar ölçüm istasyonunda:
- Rüzgar Hız Sensörü,
- Rüzgar Yön Sensörü
- Hava Sıcaklık Sensörü
- Bağıl Nem Sensörü
- Basınç Sensörü
- Ölçüm Kayıt Cihazı (Data Logger) bulunur.
- Rüzgar ölçüm direğinin yüksekliği en az 60 metre olmalıdır.
- Basınç, sıcaklık ve nem ölçümleri en az 3 metrede yapılır.
- Başvuru sahibi bu ölçümlere ilave olarak farklı seviyelerde sıcaklık, nem ve basınç ölçümü yapabilir.
Rüzgar hızı: Rüzgarın hızı, havanın hareket süratini gösterir. Bir rüzgar hızı, onu meydana getiren iki nokta arasındaki basınç farkına ve bu iki nokta arasındaki uzaklığa bağlıdır. Basınç farkı ne kadar fazla ve iki nokta arasındaki uzaklık ne kadar az ise rüzgar hızı o ölçüde fazla olacaktır. Rüzgar hızı anemometre ile ölçülür. Anemometrenin yazıcı tipte olanına ise anemograf adı verilir. Rüzgar hızı, m/s, km/h ve knot (deniz mili/saat) birimleri ile ifade edilir 1 m/sn hızla esen rüzgarın çarptığı 1 m2’lik yüzeye yaptığı basınç 0.076 kg‘dır. Rüzgar Santral ölçümlerinde ve tahminlerinde m/s birimi kullanılır.

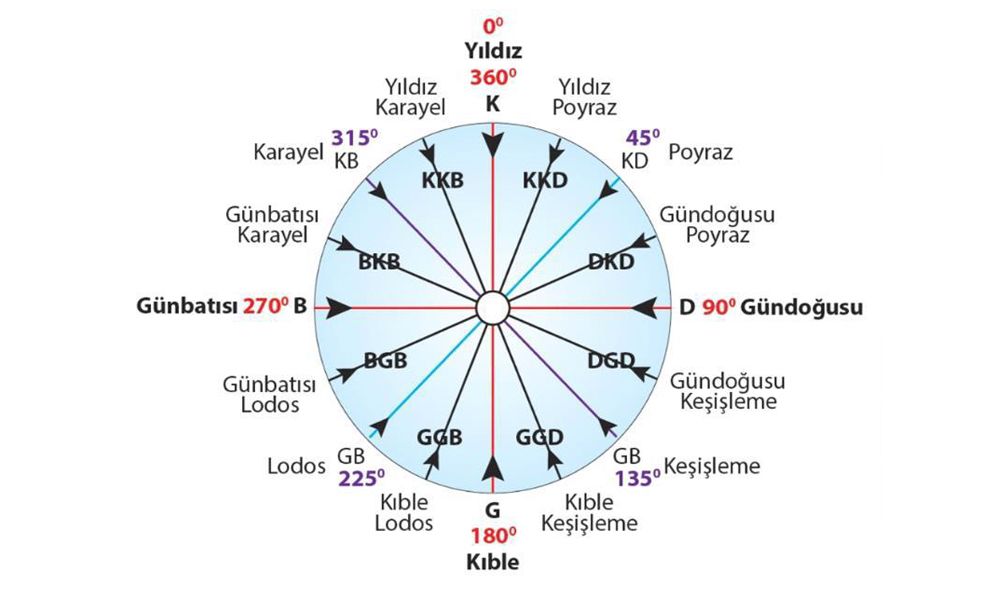
Rüzgâr Yönü: Rüzgârın bulunduğumuz yere doğru geldiği yöne rüzgâr yönü denir. Rüzgâr yönü jirüet (anemoskop), windjak (windsock), (rüzgâr torbası), (rüzgâr tulumu) ve Wind Vane (Yön Sensörleri) ile belirlenir. Meteorolojide rüzgâr esiş yönleri coğrafik yönlerle açıklanır. Rüzgâr yönü “E” denildiği zaman, doğudan batıya doğru hareket eden hava akımı anlaşılır. Rüzgâr yönü gözlemleri 8 yön dikkate alınarak yapılır.
2.1 Rüzgâr Ölçüm İstasyonunda Bulunan Aletler
2.2.1 Rüzgâr Hız Sensörü (Anemometre)
Anemometreler rüzgâr hızını elektriksel sinyale dönüştüren sensörlerdir. Kepçe, ultrasonik ve propeller anemometre olmak üzere 3 tip anemometre vardır.
a. Kepçe Anemometre: Kepçe rotorunun bir dönüşü için geçen süreye göre rüzgâr hızı belir- lenir. Rüzgâr hızı ölçümlerinde en yaygın olarak kullanılan anemometreler kepçe anemometreleridir.

b. Ultrasonik Anemometre: Her bir uçtan yayılan ses dalgasının diğer kol tarafından alınması sırasında geçen sürenin ölçülmesi prensibi ile çalışmaktadır.

c. Propeller Anemometre: Propeller anemometrenin çalışma prensibi de kepçe anemometre- lerle aynıdır. Bu tip anemometreler rüzgâr yönüne paralel monte edildiğinde yatay rüzgâr hızını, dik monte edildiğinde de dikey rüzgâr hızını ölçerler.

2.1.1 Rüzgâr Yön Sensörü (Windvane)
lçüm yapılan bölgedeki rüzgâr, belirli bir hâkim yönden esebileceği gibi, farklı yön- lerden de esebilir. Rüzgâr yönlerinin değişen frekanslarını ve rüzgâr hızlarının dağılımını göstermek için yönünün de ölçülmesi gerekmektedir. Windvane rüzgâr yön bilgisini elektriksel sin- yale çeviren sensördür. Bir rüzgâr gülü (windrose) 8 veya 16 yöne göre olabilir; ya da Avrupa Rüzgâr Atlas’ında esas alındığı gibi 12 yöne, 30’ar derecelik yön aralıklarına göre de olabilir. Yön sensörünün hareketini göstermektedir. 360 derece boyunca sonsuz olarak hareket eder ve bölgenin rüzgâr gülünü (windrose) çıkartır.

2.1.2 Sıcaklık ve Nem Sensörü
Termometre olarak da bilinen sıcaklık sensörü genellikle ölçüm direğinin 2 veya 3. metresine monte edilir. (Alt yüklenicinin tasarımına göre de değişiklik gösterebilir.) Bağıl nem, verilen bir sıcaklıkta havanın içerdiği nem miktarının, aynı sıcaklıkta içerebileceği maksimum nem miktarına oranı olarak tanımlanır. Diğer bir deyişle bağıl nem, havanın buhar içeriğinin kapasitesine oranıdır ve yüzde olarak ifade edilir:
Bağıl Nem (RH) = (Aktüel Su Buharı Miktarı / Maksimum Su Buharı Miktarı ) x 100
Rüzgâr ölçüm amaçlı kullanılan nem sensörleri, tek veya bazen de sıcaklık sensörü ile kombine olabilmektedir. Neme karşı duyarlı olan materyal karbondan yapılmış olup nem değişiminde direnci değişmektedir, bu direnç değişiminden yararlanılarak bağıl nem ölçülmektedir.

2.1.3 Veri Toplayıcı (Data Logger)
Rüzgâr ölçüm direğinde kaydı tutulan bütün verilerin elektronik olarak saklandığı ve değerlendirilmesinin yapıldığı ortamı sağlayan teçhizattır. Farklı markalara ait ve değişik dizaynlarda bulunabilirler. Ayrıca Şekil 2.8’de verinin saklandığı veri yongaları (data chip), piller ve nem alıcı da görülmektedir. Veri toplayıcı, 1 veya 10 dakikalık ve saatlik olarak düzenli aralıklarla ortalama ve ekstrem verilere ek olarak standart sapma da hesaplanıp vermektedir.

2.1.4 Basınç Sensörü
(Barometre) Barometre, atmosferdeki hava basıncını ölçmeye yarayan alete verilen addır. Baro- metre ile atmosferdeki açık hava basıncı milibar cinsinden ölçülmektedir.

2.1.6 İkaz Lambası
Rüzgâr direğinin hava taşıtlarına tehlike oluşturmasını önlemek için, direğin tepesine kırmızı ışık yayan LED aydınlatmalı en az 1 adet uygun bir ikaz lambası kurulmalıdır.

2.1.7 Paratoner
Havadaki elektrik yükünü toprağa aktarmayı amaçlayan bir araçtır. Topraklama sayesinde bakır iletkene gelen yıldırım etkisiz hale getirilir.

2.1.8 Güneş Paneli ve Şarj Cihazı
Direk üzerinde bulunan veri kayıt cihazının ve haberleşme sisteminin enerjilendirilmesi 1 adet güneş paneli ve akü yardımı ile sağlanır.
2.1.9 GSM Modem
Datalogger’da saklanan veriler yerel olarak notebook ya da PC’den okunabilir. Opsiyonel olarak dataloggera bağlanan bir GSM modem, bilgisayara uzak veri iletimini bir telefon hattı ile sağlar.

2.2 Sensörlerin Kalibrasyonları
Kalibrasyon işlemi, bilinen bir değere karşı ölçüm aletinin verdiği sonucun karşılaştırıl- ması olarak açıklanabilir. Örnek olarak 1 kg ağırlığındaki kütleyi doğru bir şekilde tayin etmek adına, ağırlığının 1 kg olduğundan emin olduğumuz ya da standartlar tarafından açık bir şekilde tanımlanmış olan 1 kg kullanılarak kefelerde karşılaştırma yapılır. Rüzgâr ölçüm sistemlerinde kullanılan ölçüm aletlerinde ise, direkt olarak kullanılabilir birimlerde ölçümler elde edilmemektedir. Örnek olarak, anemometreler Hertz (saniyedeki dönüş miktarı Hz.) cinsinden çıktıları verirken, yön ölçümleri sonucu 210 tane sayıdan birini ya da direnç çıktısını verebilir. Bu çıktıların hangi değerlere karşılık geldiği sensörlerin kalibrasyonun yapılması sonucunda belirlenebilir. Bu anlamda her sensör öncelikli olarak fabrika çıkışında, ardından standartlarda belirtilen sürelerde ölçüm aldıktan sonra kalibre edilmesi gereklidir.
Anemometrelerin kalibrasyonu sırasından hava tünelleri kullanılır ve bu tünellerde bili- nen rüzgâr hız değeri sensörden elde edilen çıktılar ile karşılaştırılarak, anemometrelerin verdiği Hz. birimine dönüşüm faktörleri uygulanır. Örnek olarak; hava tünelinde 6,2 m/s değerindeki rüzgâr hızı için anemometrenin 3 Hz. çıktısı vermesi durumunda, anemometredeki çıktılar 2 çarpanı ile genişletilmesi ve 0,2 değeri ile ötelenmesi gerekmektedir. Bu tarz sonuçlar birden çok nokta için elde edilerek anemometre için nihai eğim ve offset değerleri elde edilmektedir. Benzer metodoloji yön, sıcaklık, basınç ve nem ölçümleri için de takip edilmektedir. Yön ölçümlerinde, sensör doğasına bağlı olarak bit ya da direnç çıktısı elde edilirken; sıcaklık, nem ve basınç ölçümlerinde ise genel olarak gerilim çıktısı elde edilmektedir. Sensörlerin kalibrasyonları sonucunda elde edilen slope ve offset değerleri veri kaydedicide yapılacak gerekli ayar- lamalar sayesinde kendi değerlerine çevrilebilmektedir. Veri kaydedicide uygulanan dönüşüm aşağıda verilen denklem aracılığıyla uygulanmaktadır.
veri = [ ( kaynak veri x slope ) + offset ]
Rüzgâr ölçüm istasyonlarının faaliyetleri sırasında sert doğa şartlarına maruz kalması olağandır. Bunun sonucu olarak ölçüm ekipmanlarının arıza kaydetmesi sonucu açığa çıkacaktır. İstasyonda gerçekleştirilmiş olan her bir müdahalenin detaylı olarak raporlanması da gerekmektedir. Arıza-bakım raporlamalarında istasyona yapılan müdahale açıkça belirtilmelidir. Değişen bir ölçüm sensörü varsa bunun için de ayrıca kalibrasyon belgelerinin sunulması gerekmektedir.
Kalibrasyon işlemini gerçekleştiren kurumların belli özelliklere sahip olması ve standartları yakalaması istenmektedir. IEC 61400-12-1 standardının Annex F bölümü anemometreler için gerçekleştirecek olan kalibrasyon işleminin standartlarını belirlemektedir. Bu standartlar hava tünelinin teknik özelliklerinden başlayarak, kalibrasyon işlemi sonucunda yayınlanacak raporun özelliklerine kadar çeşitli noktalarda yol göstermektedir. Örnek olarak kalibrasyon iş- leminin başlamasından önce anemometrenin 5 dakika boyunca 10 m/s hızındaki tünelde kal- ması önerilmektedir. Ardından kalibrasyonun 4 m/s ve 16 m/s arasındaki değerlerde gerçekleştirilmesi aktarılmaktadır. Kalibrasyon sonucunda yayımlanacak raporda ise seri numaralarının, kalibrasyon görevlisi bilgilerinin, kalibrasyonun gerçekleştirildiği tarihin, kalibrasyonu yapılan sensöre ait resminin ve daha birçok bilginin bu rapor içeriğinde bulunması gerektiği belirtilmektedir.
İstasyonlarda gerçekleştirilecek ölçümlerin her ne kadar belli yönetmelikler vasıtasıyla, yasal olarak minimum ölçüm süreleri belirtilmiş olsa da sahadaki rüzgâr özelliklerinde meydana gelecek yıllar arası sezonsal etkileri yakalayabilmesi adına en azından 5 yıl kadar ölçüme devam etmesi yararlı olacaktır. Bu sayede belirsizlikler daha makul seviyelerde seyre- decektir. Teknik sebepler nedeniyle yeterli süre zarfı içerisinde ölçüm alamayan istasyonlar için veri tamamlama prosedürleri takip edilmeli ve güvenilir uzun dönem veri kaynakları kullanılarak uyumu kontrol edilmelidir. Bu tarz durumlarda ise ölçümün tasvir yeteneği azalacağından belirsizliklerde artış gözlemlenme ihtimali yüksektir.
Avrupa’da birçok laboratuvarda anemometre kalibrasyonu bulunmaktadır. MEASNET (MEASuring NETwork Institutes of European) 7 Kasım 1996 tarihinde 3 üye ile kurulan ve Avrupa’daki rüzgâr ölçüm ve diğer teknik konularda danışmanlık yapan enstitüleri kapsayan bir akreditasyon enstitüsüdür. Üye kuruluşlar, uzman grup çalışmaları ile rüzgâr endüstrisi için anemometre kalibrasyonu, güç kalitesi ve performansı, gürültü emisyonu ve saha değerlendir- mesi başlıkları altında standardizasyon çalışmaları yapmaktadırlar. MEASNET, şu anda 18 üyeye sahiptir. Uluslararası banka ve kreditörler, MEASNET tarafından ortaya konan prosedürlere göre yapılan kalibrasyon ve diğer mühendislik hizmetlerini özellikle tercih etmektedirler.
2.2.1 Anemometre Kalibrasyonu İçin Gerekli Şartlar
Anemometre kalibrasyonu için aşağıdaki malzemelerin kullanılması zorunludur:
1. Rüzgâr tüneli,
2. Kullanılan bütün ölçüm cihazlarının kalibrasyonlarının olması,
3. ISO 3966 standartlarına uygun pitot tüpleri,
4. Her kalibrasyon öncesi kullanılan bütün cihazların hazırlanarak bunun için ilgili enstitüde kullanılan referans anemometre ile test edilmesi,
5. Akış kalite ölçümünün yapılması,
6. Kalibrasyonun birkaç kez denenmesi.

2.3 Rüzgâr Ölçüm İstasyonu Seçimi
2.3.1 Rüzgâr Ölçüm Sistemleri
Rüzgâr ölçüm istasyonu kurulumu veya meteorolojik rüzgâr ölçüm direkleri, (met direkler) rüzgâr enerjisi ile ilgili özelliklerin sürekli ölçümü için en uygun platformu sunar. Rüzgâr ölçüm direği kurulumu karada veya açık denizde rüzgâr çiftliğinin planlandığı yere mümkün olduğunca yakın yerlerde yapılır. Tercihen bir veya daha fazla rüzgâr ölçüm direği geliştirilen rüzgâr parkının öngörülen alanına yerleştirilir. Neredeyse tüm rüzgâr santrallerinde direk montajı, rüzgâr kaynağı özelliklerinin belirlenmesinde çok önemlidir. Bununla birlikte FGW, MEASNET ve IEC standartlarına uygun olarak güvenilir bir ölçüm periyodu sağlamak için önerilen rüzgâr ölçüm kulelerinin miktarı, arazinin karmaşıklığına ve alanın genişliğine, yani rüzgâr çiftliği için planla- nan rüzgâr türbinlerinin miktarına bağlıdır. SODAR ve LİDAR gibi uzaktan algılamadan (RSD) yararlanmak isteyen rüzgâr parkı geliştiricileri ve rüzgâr çiftliği operatörleri için, çoğu durumda, doğrulama da RSD operasyon sahasının yanına veya yakınına en az bir kısa rüzgâr ölçüm direği kurmaları gerekir. RSD cihazı, maliyetleri düşürmek veya veri güvenilirliğini artırmak ve veri belirsizliğini güvenilir bir düzeye ve kaliteye düşürmek için sigorta ve yeniden doğrulama maliyetleri hesaba katıldığında, özellikle ölçüm süresi bir yıldan uzunsa, bir kafes rüzgâr direği ölçümü yalnızca sahada bir RSD (SODAR veya LİDAR gibi) çalıştırmaya kıyasla daha ucuzdur.
2.3.1.1 Boru Tip Direkler
Borulu rüzgâr ölçüm direkleri genellikle yaklaşık 2-5 yıla kadar tasarım ömrüne sahiptir. Günümüzde rüzgâr enerjisi ile ilgili boru tip rüzgâr ölçüm direkleri çoğunlukla sadece 30 metre ile 60 metre yüksekliklerde mevcuttur. Daha yüksek direkler genellikle kafes kule yapısındadır. Çelik borulardan ve montajı zıvana ile birbirine geçme olarak imal edilirler. Bu tarz direklerin en büyük dezavantajı da ölçüm cihazlarında bir sorun olduğu zaman direk tamamen yerinden çıkartılıp cihazların sorunu giderildiği zaman yerine tekrardan monte edilmesi gerekliliğidir.

2.3.1.2 Kafes Tip Direkler
Kafes tipi direkler ise yerden başlayıp basamaklı bir şekilde örülerek yapılır. En büyük avantajı da ölçüm cihazlarının tamirinde direk sökülmeden yerinde sorunun giderilebilmesidir. Tırmanma kolaylığı olduğundan ölçüm cihazlarında herhangi bir sorun tespit edildiğinde, direk yere indirilmeden gerekli müdahalenin yapılmasıdır. Ayrıca kullanılan bütün malzemeler genellikle sıcak daldırma galvaniz kaplamadır. Korozyona ve paslanmaya karşı dayanıklılık esastır.

Gerek boru tip direklerde ve gerekse de kafes tip rüzgâr ölçüm direklerinde iki önemli kısım vardır. Mekanik ve elektronik. Mekanik kısım, taban ankraj, çelik halatlar, borular, kazıklar ve diğer hırdavat malzemeler; elektronik kısım ise, anemometre, yön sensörü, veri toplayıcı, kablolar vb. gibi diğer elektronik cihazlardan oluşmaktadır.
2.3.2 Rüzgâr Ölçüm Direği Kurulumunda Dikkat Edilmesi Gereken Hususlar
1) İstasyon, rüzgâr profilini değiştirecek engellerden uzak yerlere kurulmalıdır.
2) Ölçüm sensörleri kuzey – güney doğrultuda olacak şekilde yatay olarak direğe monte edilmelidir.
3) İstasyon, ölçüm yüksekliğine bağlı olarak direk tipi (iç içe geçmeli boru veya demir üçgen, dörtgen profil) şeklinde projelendirilmelidir.
4) Ölçüm direğinin yüksek rüzgâr hızlarında devrilmesini önleyecek bir bağlantı türü ile toprağa yerleştirilmelidir. Bu amaçla çelik teller kullanılması tavsiye edilmektedir.
5) İdeal ölçüm yüksekliği, türbin göbek yüksekliğinin en az 2/3 oranında olmalıdır. Türbin göbek yüksekliğine ve arazi yapısına göre bu yükseklik artırılabilmektedir.
6) Sistemin uçuşlara engel olmaması için direk üzerine yanıp sönen kırmızı flaşör lamba ve paratoner tesisatı projelendirilmelidir.
7) Direk üzerine monte edilecek sistemlerin periyodik bakım, onarım ve kalibrasyonları için direklerin yatırılabilir olması sağlanmalıdır.
8) Sensörlerin yerlerine uygun bir şekilde monte edilip edilemediği kontrol edilmelidir.
9) Ölçüm direği üzerinde en az 2 adet anemometre kullanılmalıdır. Eğer 30 metre yüksekliğinde direk kullanılıyorsa, 10 metre ve 30 metrede monte edilecek biçimde en az 2 adet anemometre yerleştirilmelidir.
10) Ölçüm aletlerinin kabloları direk üzerine bağlanmalı, hiçbir kablo sarkık durumda olmamalıdır.
11) Ölçüm direğinin en üstüne yerleştirilecek anemometre, direk ekseni üzerinde ve direğin üst seviyesinden yaklaşık 1 metre yukarıya bütün yönlerde engellerden arındırılmış olarak monte edilmelidir.
12) Sensörler, yan kol üzerinde ölçüm direğine paralel olarak uzanan en az 30 cm uzunluğundaki bir çubuğun üzerine monte edilmelidir.
13) Ara ölçüm aletlerini ölçüm direğine bağlayabilmek için yan kol kullanılmalıdır. Bu yan kolların taşıdığı ölçü aletlerinin ölçüm direğine olan uzaklığı, ölçüm direğinin çapının en az 7 katı kadar olmalıdır. Uygulamalarda genellikle 1metre olarak alınmaktadır. Bu yan kollar hâkim rüzgâr yönüne doğru monte edilmelidir.
14) Yön sensörü 30 metrede ve yan kol üzerinde monte edilmelidir. Eğer en üst noktadaki anemometre ile aynı seviyede monte edilecekse, anemometre ile aralarında 2 metre mesafe bulunmalıdır.
15) Yıldırım çubuğu anemometreden en az 50 cm mesafede olmalı ve vibrasyondan etkilenmemelidir. Anemometrenin üzerinde bir yüksekliğe sahip olmalıdır ve direk düşey ekseni ile 60º açı yapmalıdır.
16) Sıcaklık, basınç ve nem sensörleri 3 metre civarında monte edilmelidir.
17) Montajı bitmiş bir ölçüm direği yer düzlemine dik konumda olmalı ve ölçüm aletlerinin hepsi tek bir direk üzerine monte edilmelidir.
18) Aynı tip ve marka ölçüm aletlerinin kalibrasyon eğrileri birbirinden tamamen farklı olup biri diğerinin yerine kullanılamaz. Bu nedenle ölçüm direği üzerine monte edilmiş ölçüm sensörleri ölçüm süresince değiştirilmemelidir.
10.07.2012 tarihli ve 28349 sayılı Resmî Gazete’de yayımlanan Rüzgâr ve Güneş Enerjisine dayalı Lisans Başvuruları için yapılacak Rüzgâr ve Güneş Ölçümleri uygulamalarına dair yönetmelik doğrultusunda 2.3.3’te verilen standartların uygulanması gerekmektedir.
2.3.3 Rüzgâr Ölçüm Direği Kurulumunda Dikkat Edilmesi Gereken Hususlar (MGM Standartlarında)
Rüzgâr Ölçüm Direği:
1) Rüzgâr ölçüm direği boyu en az 60 metre olmalıdır. Direk, boru veya kafes yapı şeklinde olabilir. Tüm direk, bağlantı kolları, ek malzemeleri ile gergi mekanizmaları paslanmaz malzemeden imal edilmiş olmalıdır.
2) Direk ve kolların dikey ve yatay konumları ile dengesini kaybetmemesi için direk, farklı yüksekliklerden yeterli sayıda gergi telleri ile zemine sabitlenir. Gergi telleri paslanmaz malzemeden imal edilmiş halat olmalı ve kışın oluşabilecek buz yüküne ve gergiye dayanmalıdır. Gergi telleri, zeminin özelliğine göre beton ankraj, kimyasal çelik dübel gibi yöntemlerle sabitlenir.
3) Rüzgâr ölçüm istasyonunda can ve mal emniyetine yönelik, gerekli güvenlik tedbirlerinin alınması amacıyla koruma çiti ve uyarı tabelaları konulur.
4) Rüzgâr direğinin hava taşıtlarına tehlike oluşturmasını önlemek için, direğin tepesine kırmızı ışık yayan LED aydınlatmalı en az 1 adet uygun bir ikaz lambası kurulmalıdır. Rüzgâr direği, kırmızı ve beyaz olarak iki renkte boyanmalıdır.
5) Rüzgâr hız ve yön ölçümü ana ölçüm seviyelerinde (rüzgâr hız ölçerlerinin birincisi genelde Türkiye’de MGM standartlarında 30 metre yükseklikte olduğu sayılsa da aslında olması gereken türbin hub’ından kanat uzunluğunun en alt kısmındaki yerdir. İkincisi ise direğin en üst noktasında kurulur. Rüzgâr yön ölçerleri ise hız ölçerlerinin türbülans etkisinde kalmaması için, hız ölçerinden 1.5 ile 2 metre aşağıya kurulabilir.) yapılır.
6) Kullanılan direk Kafes Tipi Ölçüm Direği ise rüzgâr hız ölçerleri hâkim rüzgâr yönüne 90º olmalıdır; Boru Tipi Ölçüm Direği ise hâkim rüzgâr yönüne 45º olmalıdır.
7) Rüzgâr hız ölçerleri ve rüzgâr yön ölçerleri birebir aynı yöne bakmalıdır.
8) Firma isterse, daha yüksek bir direk kurarak, ara seviyelerde de ölçüm yapabilir. (Yukarıdan 20 metre aşağıda olabilir.)
9) Direk boru ise rüzgâr ölçerin konulduğu yükseklikteki kesit çapı “D ”, direk kafes yapılı ise rüzgâr ölçerin konulduğu yükseklikteki kesit uzunluğu “D1 “, rüzgâr ölçerin bağlantı kolunun çapı veya kesit uzunluğu “D2 “ise direğe bağlanan kolların ölçüleri şekildeki gibi olabilir. (Şekil 2.18)
10) Anemometrelerden birisi direğin en üst noktasına ve direğin ekseninde kurulabilir.


11) En üst seviyedeki rüzgâr hız ölçerde arıza meydana gelmesi ihtimaline karşın ikinci bir hız ölçer konulmalıdır. (2 tepede 1 altta olmak üzere minimum 3 hız ölçer olmalı)
12) Direk ekseni Türkiye’de 45 cm dir. Direk ekseninin 60 70 cm olması idealdir.
13) Anemometrelerden ikincisinin 30 metre yüksekliğe kurulması zorunludur.
14) Rüzgâr yön ölçer, hız ölçerinin türbülans etkisinde kalmaması için 1.5 ile 2,5 metre yukarı veya aşağı kurulabilir.
15) Yatay bağlantı kollarının direğe bağlantısı sağlam olmalı ve yatay durmalı, titreşim ve sallanma yapmamalıdır. Düşey kollar yatay eksene dik olacak şekilde (direğe paralel) kurulur.






Bu ürün için size geri dönüş yapalım
Teknik detay, fiyat bilgisi veya teklif talebiniz için formu doldurun. Talebiniz doğrudan ilgili ekibe iletilir.